
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio


publications
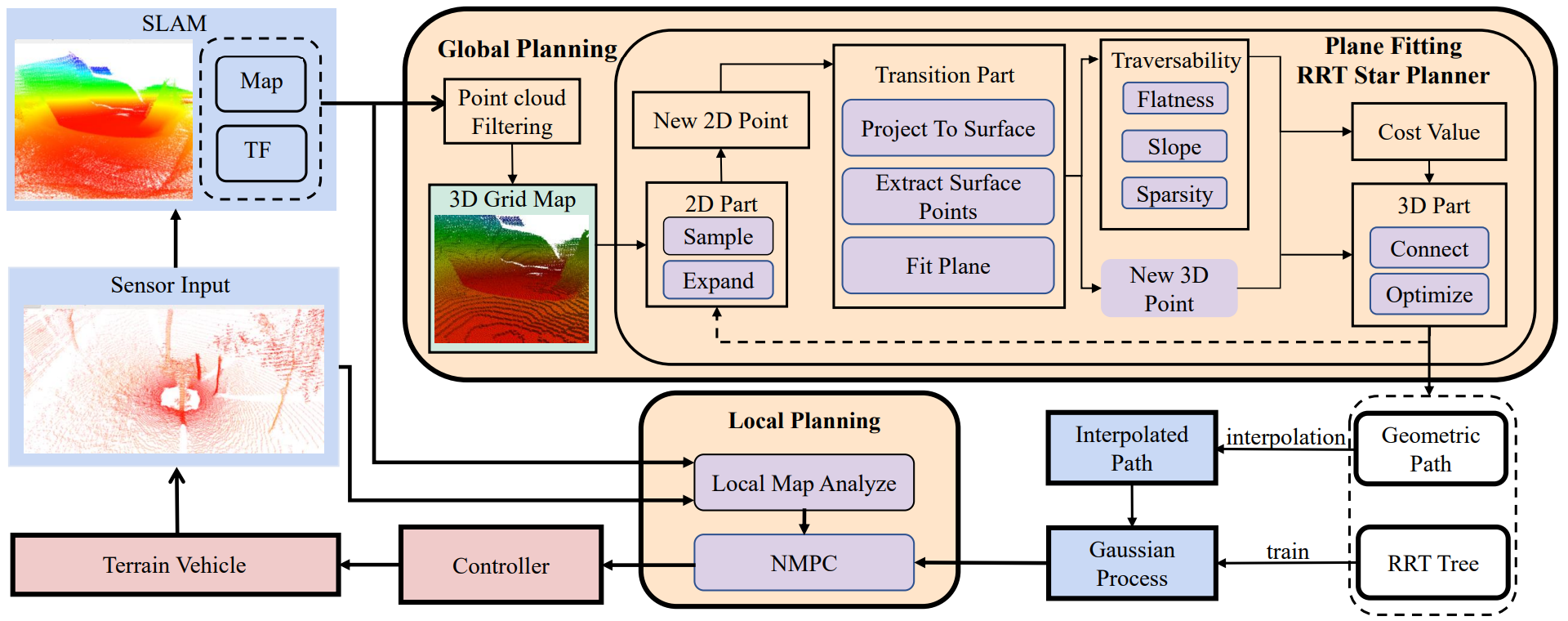
Putn: A plane-fitting based uneven terrain navigation framework
Published in International Conference on Intelligent Robots and Systems (IROS) · IROS 2022. 23 October- 27 October 2022 | Kyoto, Japan, 2022
This paper proposes a Plane-Fitting based Uneven Terrain Navigation (PUTN) framework for autonomous ground robots in unstructured 3D environments. PUTN combines an improved Plane Fitting RRT* for sparse trajectory generation, Gaussian Process Regression for trajectory interpolation, and Nonlinear Model Predictive Control (NMPC) for local planning. Experiments demonstrate PUTN’s robust, safe motion planning in uneven terrain, validated through real-world testing.
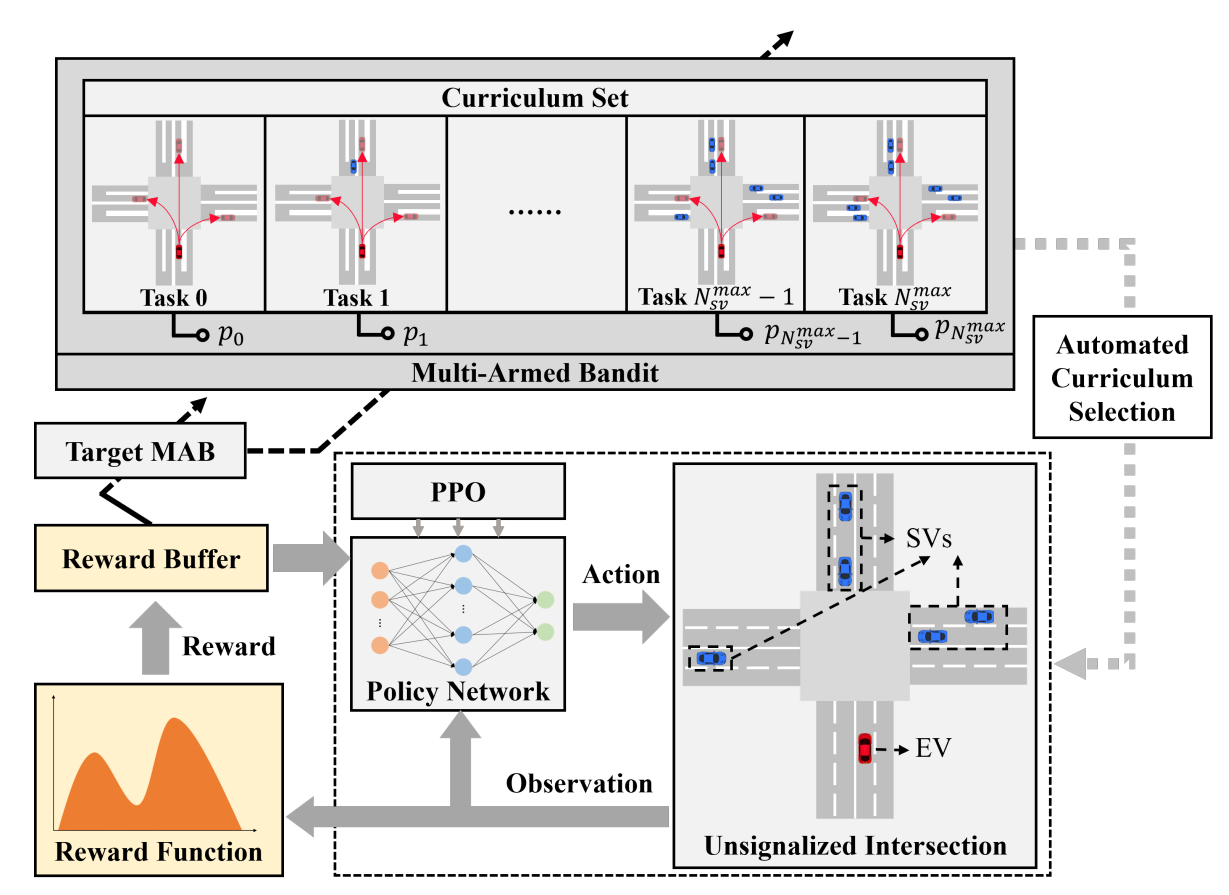
Reward-Driven Automated Curriculum Learning for Interaction-Aware Self-Driving at Unsignalized Intersections
Published in International Conference on Intelligent Robots and Systems (IROS) · IROS 2024. 14 October- 18 October 2024 | Abu Dhabi, UAE, 2024
This paper introduces a reward-driven automated curriculum learning framework for self-driving at unsignalized intersections, addressing uncertainties in surrounding vehicles’ intentions and quantities. A progressive curriculum and well-designed reward function improve policy exploration and sample efficiency. Experiments in Highway-Env and CARLA show superior success rates, robustness, and adaptability, validating the method’s effectiveness in handling complex driving interactions.
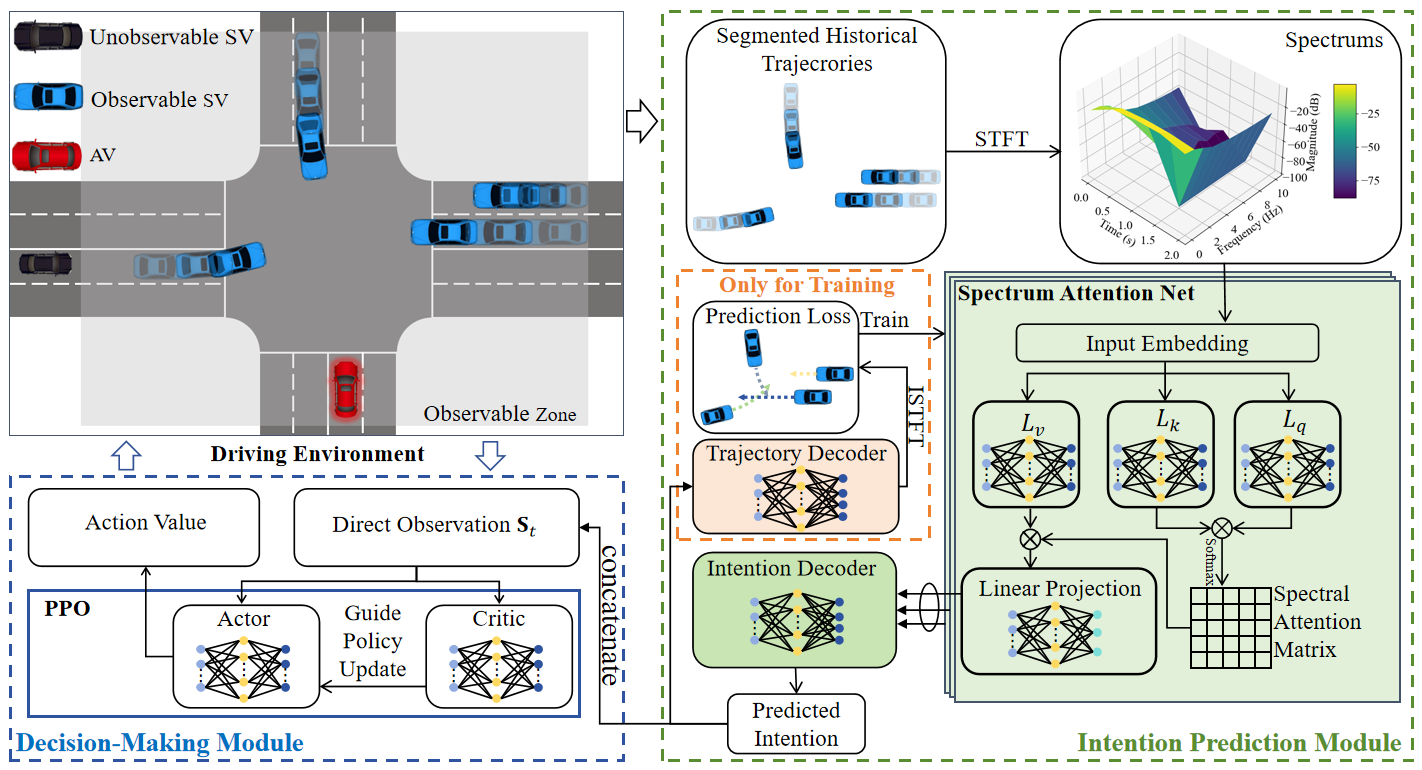
Integrated Intention Prediction and Decision-Making with Spectrum Attention Net and Proximal Policy Optimization
Published in The 27th IEEE International Conference on Intelligent Transportation Systems. 24 Sep- 27 Sep 2024 | Edmonton, Canada, 2024
This paper presents an integrated intention prediction and decision-making framework for autonomous driving. A spectrum attention net predicts surrounding vehicle intentions efficiently by analyzing frequency components, while the proximal policy optimization (PPO) algorithm addresses non-stationary issues with policy updates. Joint learning integrates both modules, and experiments demonstrate superior performance in safety, efficiency, and success rates compared to deep reinforcement learning baselines.
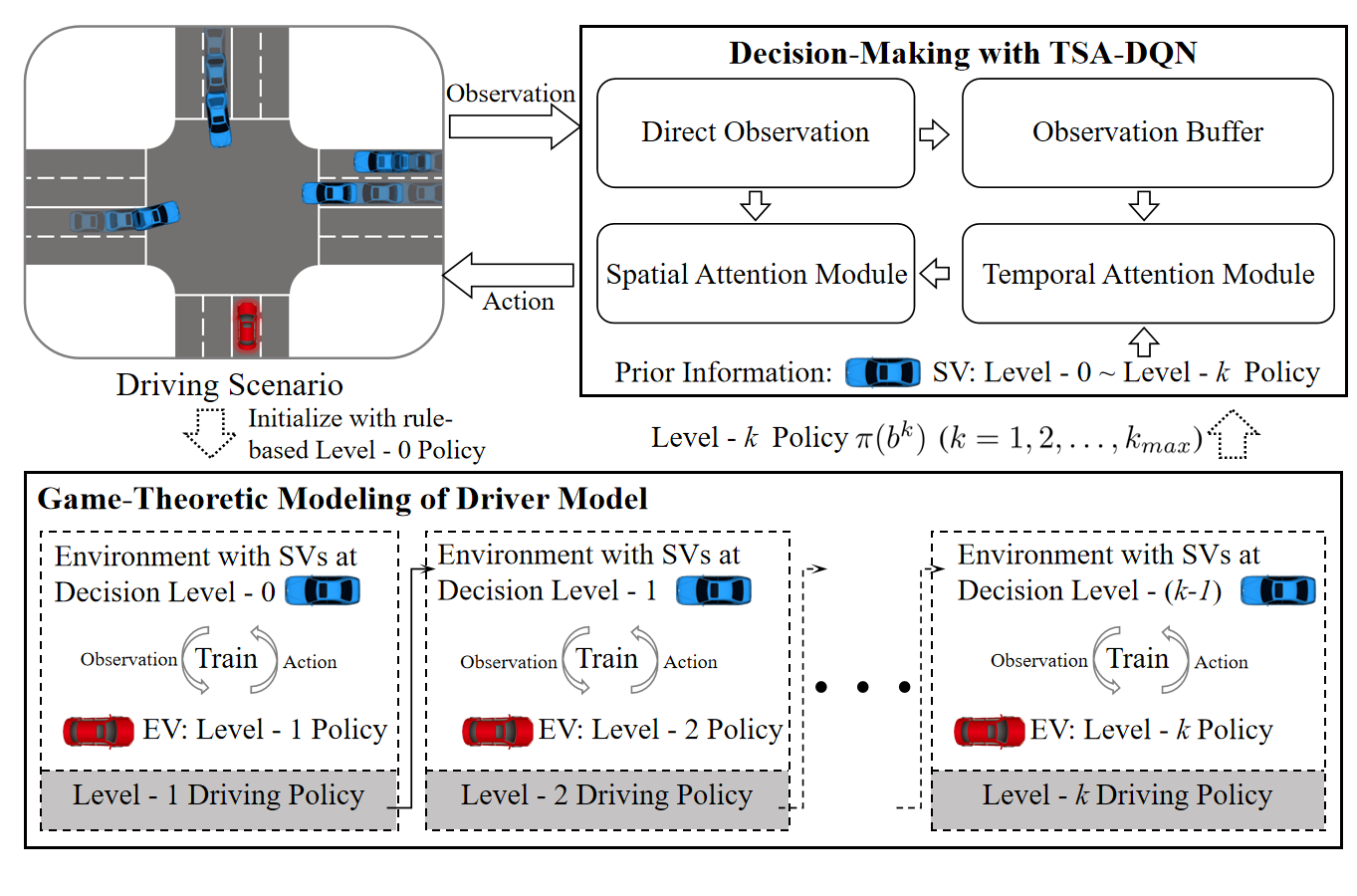
Game-Theoretic Driver Modeling and Decision-Making for Autonomous Driving with Temporal-Spatial Attention-Based Deep Q-Learning
Published in IEEE TRANSACTIONS ON INTELLIGENT VEHICLES, 2024
A game-theoretic driver modeling and decision-making framework with level-k reasoning for autonomous vehicles is proposed. A temporal-spatial attention-based deep Q-learning (TSA-DQN) algorithm is developed to estimate the decision level of surrounding vehicles and optimize ego vehicle’s decision. Simulations demonstrate improved safety, efficiency, and success rates over baselines in various driving scenarios. Real-world testing further confirms the algorithm’s practical feasibility.
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.